University of Toronto Foot-Mounted Inertial Navigation Dataset
This dataset consists of measurements from a foot-mounted inertial measurement unit (IMU). In total, we provide data from five different test subjects travelling over more than 7.6 km. The data are combined with various forms of ground truth positioning information that can be used to evaluate the accuracy of a zero-velocity-aided, foot-mounted inertial navigation system (INS). In contrast to other similar datasets, our data incorporate several non-walking motions, such as running, crawling, and stair-climbing, as well as mixed-motion trials in which the test subjects alternated between walking and running. In addition to the dataset itself, we also provide an open source foot-mounted INS, with several zero-velocity detector implementations already coded up. The Python-based INS (called PyShoe), along with a suite of data processing tools, is available in the dataset’s repository. Please refer to the repository for instructions on how to download and begin using our dataset. The complete dataset is also available (open access) via IEEE DataPort.
Hardware Overview
Data were collected from two IMUs: the LORD MicroStrain 3DM-GX3-25 and VectorNav VN-100. The MicroStrain was used to collect measurements with corresponding ground truth provided by a VICON motion capture system; the VN-100 was used to collect our hallway and stair-climbing dataset (see below for descriptions). Both IMUs operated at 200 Hz.


Datasets
We currently provide three different inertial datasets as part of the complete dataset package:
VICON Dataset
Measurements were collected within a 3×3 meter motion capture area, where accurate position ground truth was available. There are 56 trials (approximately 1 km of motion) gathered from a single test subject, where the motions consist of walking, jogging, running, crawling, and (ladder) climbing. Within each trial, the test subject ensured to the best of their ability that only a single motion type was maintained, and that it was performed with a constant gait frequency.
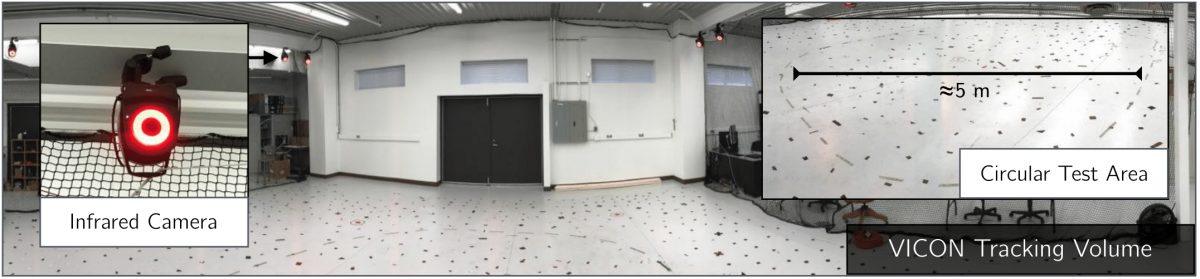
The VICON motion capture area.
Hallway Dataset
The hallway dataset incorporates walking and running motions through three connected hallways (with a one-way distance of 110 m). In total, 39 trials were collected, including data from five different test subjects. There are intermediate ground truth marker locations along the path that we surveyed in using a Leica M550 MultiStation.

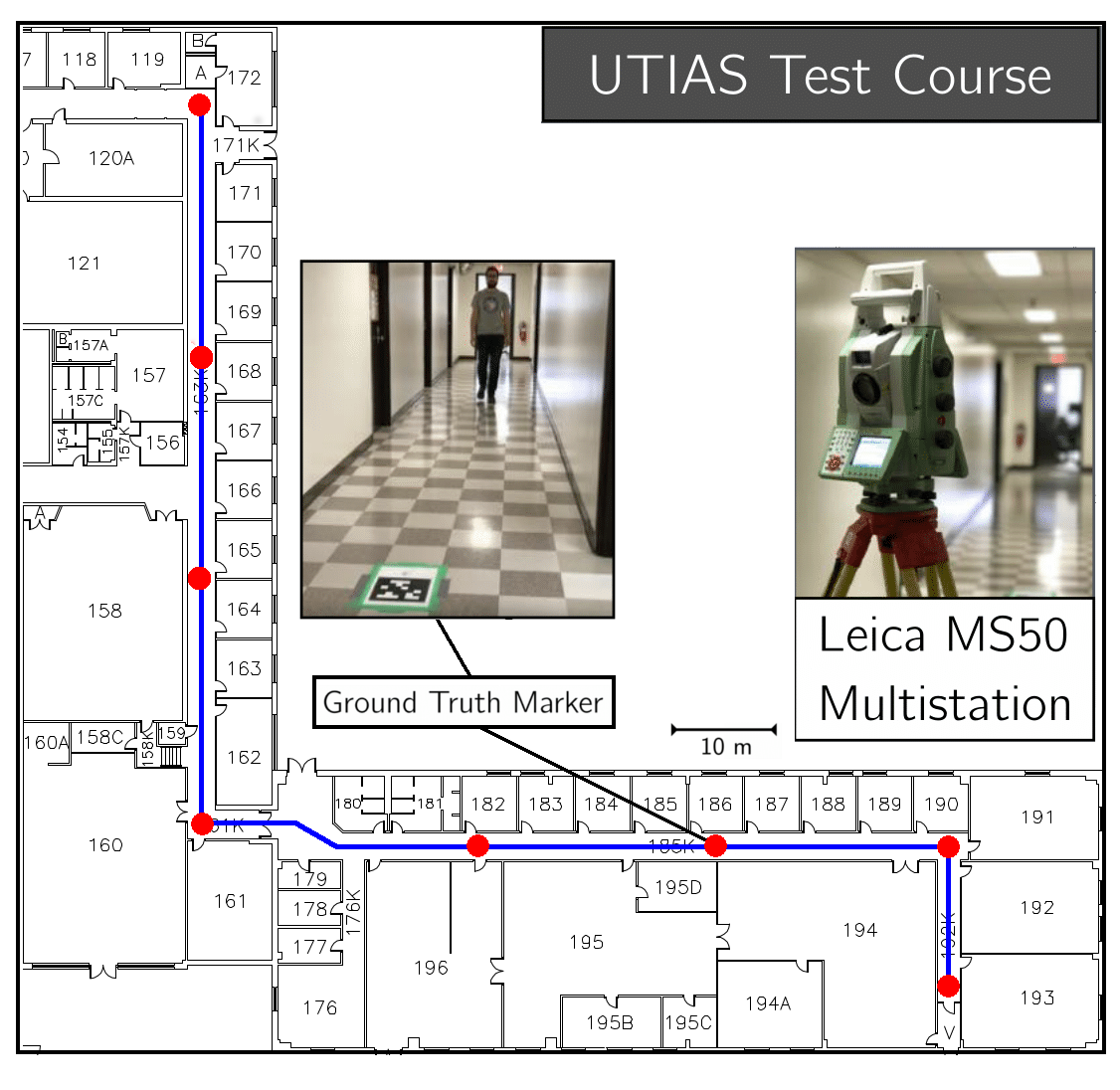
The Hallway Test Course
Stair-Climbing Dataset
This dataset consists of 14 stairway trials. in which a total of 80 flights of stairs were climbed. To establish ground truth, we recorded when the single test subject reached the top of each flight. Given the known vertical height of each flight, the vertical position error can be evaluated.
Questions?
If you encounter any problem using the scripts in our GitHub repository, please open an issue. Any other questions/inquiries/feedback can be sent to Brandon Wagstaff at brandon.wagstaff@robotics.utias.utoronto.ca.
About the Authors

Brandon Wagstaff was a Ph.D. student with the STARS Laboratory and the project lead for the development of our enhanced, learning-based foot-mounted INS systems.
Valentin Peretroukhin was a Ph.D. student with the STARS Laboratory. His research focused on learning-based methods for accurate robot navigation.
Dr. Jonathan Kelly is the Director of the STARS Laboratory, and has research interests in 3D computer vision, probabilistic modelling, estimation theory, and machine learning.