Meet Ada and Joe, our pair of Franka Emika Research 3 manipulators. These robots are our newest arrivals (set up in 2023) and are ideally suited for our work because they have low-level torque control capabilities (at each joint). Similar to their predecessor, the Panda, these robots are well integrated within the ROS ecosystem. Each FR3 has seven joints, a reach of 0.86 metres, and can lift up to 3 kilograms. To make Joe and Ada the ultimate research arms, we have added the following components:
- dual ATI Axia80-M8 force-torque sensors (8 kHz bandwidth over Ethernet);
- dual Robotiq 2F-85 adaptive grippers (85 mm stroke; up to 235 N grip force); and
- dual Intel Realsense D405 depth cameras (1280 × 720 pixels; 7 cm minimum range).

Our FR3 robots are named after Joseph (Joe) Engelberger and Ada Lovelace. Joseph Engelberger (1925-2015) was an American physicist, engineer, and inventor. Together with George Devol, he founded Unimation, the first real robotics company, in the 1950s. Unimation developed and sold the Unimate robot arm, the first real industrial robot arm on the market, and later built and sold the PUMA arm (see ‘Victor’ below). Engelberger is also known for creating the HelpMate helper robot, which was used in hospitals around the world during the 1980s and 1990s.
Ada Lovelace (1815-1852) was an English mathematician and writer. The daughter of the poet Lord Byron, she trained in mathematics from a young age – she personally described her work as a combination of poetry and math. Lovelace is recognized as the first computer programmer: she wrote an algorithm to compute the sequence of Bernoulli numbers using Charles Babbage’s proposed Analytical Engine, ca. 1843. She foresaw the capability of the Analytical Engine to perform tasks other than pure computation, such as composing music.
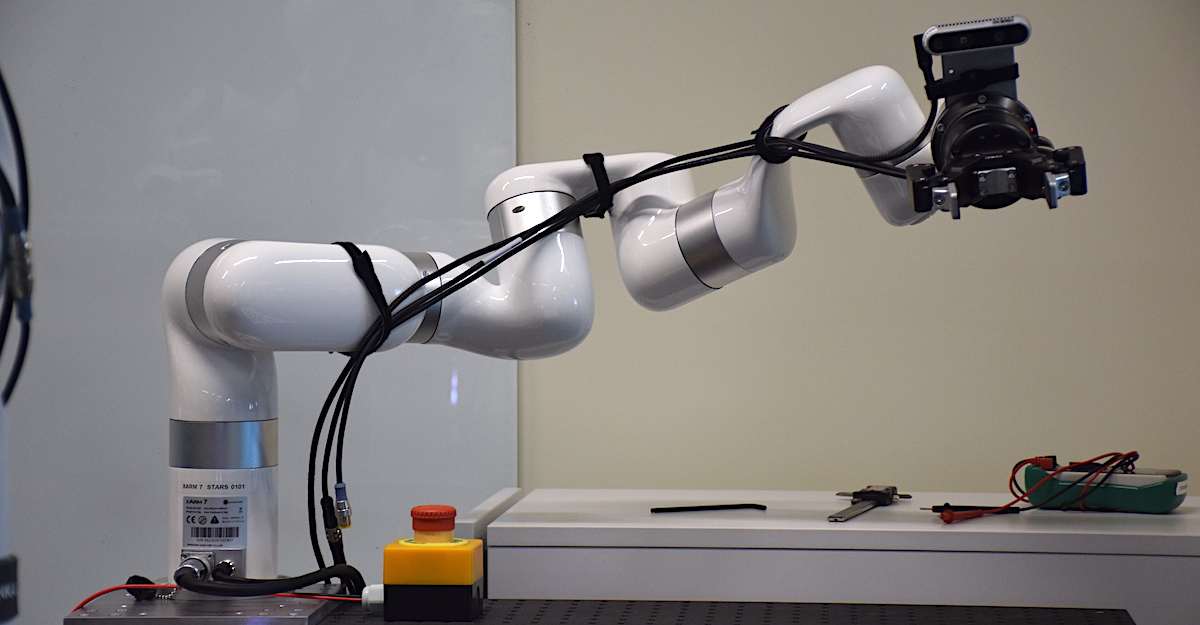
Meet Gladys, our lightweight manipulator. Gladys is a UFactory xArm 7 Model 1 7-DoF robot arm that can lift a payload of up to 3.5 kilograms and has a repeatability of 0.1 mm. The redundancy provided by the seventh joint offers additional flexibility during task execution. The arm has a mass of about 14 kilograms, which is very light compared to other arms. It is equipped with a two-finger gripper that can adapt to accommodate cylindrical or cuboidal objects. Gladys is built from the following:
- a UFactory xArm 7 manipulator (14 kg; carbon fibre segments);
- a Robotiq FT-300S force-torque sensor (300 N force range; 30 Nm moment range);
- a Robotiq 2F-85 adaptive parallel gripper (85 mm stroke; up to 235 N grip force); and
- an Intel Realsense D435 depth camera (1280 × 720 pixels).
This robot is named after Dr. Gladys West, who came from a modest African-American family of sharecroppers and factory workers in Virginia. She was only the second black woman to be hired at the Naval Proving Grounds; Dr. West developed the satellite geodesy models that are essential to the correct operation of the Global Positioning System (GPS). In 2021, Dr. West received the Prince Philip Medal from the UK’s Royal Academy of Engineering, their highest individual honour.
Meet Victor, our mobile manipulation platform. Victor is capable of omnidirectional motion – driving in any direction on a planar surface – and has an arm with a reach of 1.3 metres. We’re using Victor to explore research questions related to high-DoF planning, control, and human-robot collaboration. Victor is built from the following:
- a Clearpath Ridgeback omnidirectional mobile base (Mecanum wheels; 135 kg; 100 kg carrying capacity);
- a Universal Robots UR10 6-DoF manipulator (34 kg; 10 kg lift capacity);
- a Robotiq FT 300 6-axis force-torque sensor (300 N force range; 30 Nm moment range); and
- a Robotiq 3-finger adaptive gripper (up to 70 N grip force).

Our mobile manipulator is named after Victor Scheinman (1942-2016), an MIT-trained engineer who in 1969 invented the Stanford arm, an advanced six-axis manipulator. In 1973, Scheinman started Vicarm Inc. to manufacture his robot arms and, in 1977, he sold his design to Unimation. With further development, Scheinman’s Vicarm manipulator became the Programmable Universal Machine for Assembly or PUMA, which Unimation sold from 1978 onward. The PUMA went on to become one of the best-known and popular robots in research and industry.