Dr. Kelly has been appointed Dean’s Catalyst Professor by the Faculty of Applied Science & Engineering, a title he will hold for three years. The Professorship is an early-career award to promote and accelerate the contributions of the Faculty’s most promising junior academic staff. Funding from the award will be used to further the Lab’s research in collaborative robotics.
Author Archives: Jonathan Kelly
Midwest Robotics Workshop talk by Prof. Kelly
Prof. Kelly is speaking tomorrow (June 14) about manipulator self-calibration at the Midwest Robotics Workshop in Chicago. Hope to see you there!
ICRA 2018 Long-Term Autonomy Workshop talk by Prof. Kelly
Thanks to everyone who attended the ICRA 2018 Workshop on Long-Term Autonomy and Deployment of Intelligent Robots in the Real World; Prof. Kelly gave a talk about developing collaborative robots for long-term service roles (“Designing for Long-Term Autonomy: Experiences with Collaborative Robots”). The panel discussion was great!

Prof. Kelly elevated to IEEE Senior Member
Prof. Kelly has been elevated to the status of Senior Member of the Institute of Electrical and Electronics Engineers (IEEE) – an award given for “significant contributions to the profession.” He began working with the IEEE as an undergraduate volunteer, initially holding the position of Student Branch Secretary.
Paper accepted at RSS 2018!
Work by our own Matt Giamou, in collaboration with Jonathan How’s Aerospace Controls Lab at MIT, will appear at Robotics: Science and Systems 2018 in Pittsburgh! The paper, “Near-Optimal Any-Com Framework for Resource-Adaptive Inter-Robot Loop Closure Detection,” focussed on loop closures under communications constraints. Congratulations Matt!
ASX Star Talk: Computer Vision on Mars
Interested in learning about how computer vision has been used on Mars? Prof. Kelly is giving a lecture on Wednesday, January 24, as part of the ASX Star Talk series – stop by to find out more. Hope to see you there!
Welcome 2017 summer students!
We’re happy to welcome new students for summer 2017: Filip Marić has joined us as an exchange student from the University of Zagreb, working on mobile manipulation as part of his MSc project, Yilun Wu from UofT Engineering Science will be conducting some exciting UAV research, and Luke Volpatti, also from Engineering Science, will extend our calibration tools. Looking forward to a great summer!
Paper accepted at ICRA 2017
Congratulations to Valentin and Lee, whose paper, “Reducing Drift in Visual Odometry by Inferring Sun Direction using a Bayesian Convolutional Neural Network”, was accepted to ICRA 2017 in Singapore! Hope to see you there for the presentation!
STARS at ISER 2016
Jonathan and Lee traveled to Japan this week for the 2016 International Symposium on Experimental Robotics (ISER) in Tokyo, where Lee presented his paper, “Improving Stereo Visual Odometry Using Visual Illumination Estimation”, to an enthusiastic crowd of robotics researchers from around the world. We had some great conversations over Japanese beer and fresh sushi, and took in the sights and sounds of Tokyo, narrowly avoiding a typhoon in the process. The next ISER is in Buenos Aires in 2018 — see you there!

Lee won one of six competitive travel grants to attend ISER, and has a cool certificate to prove it!
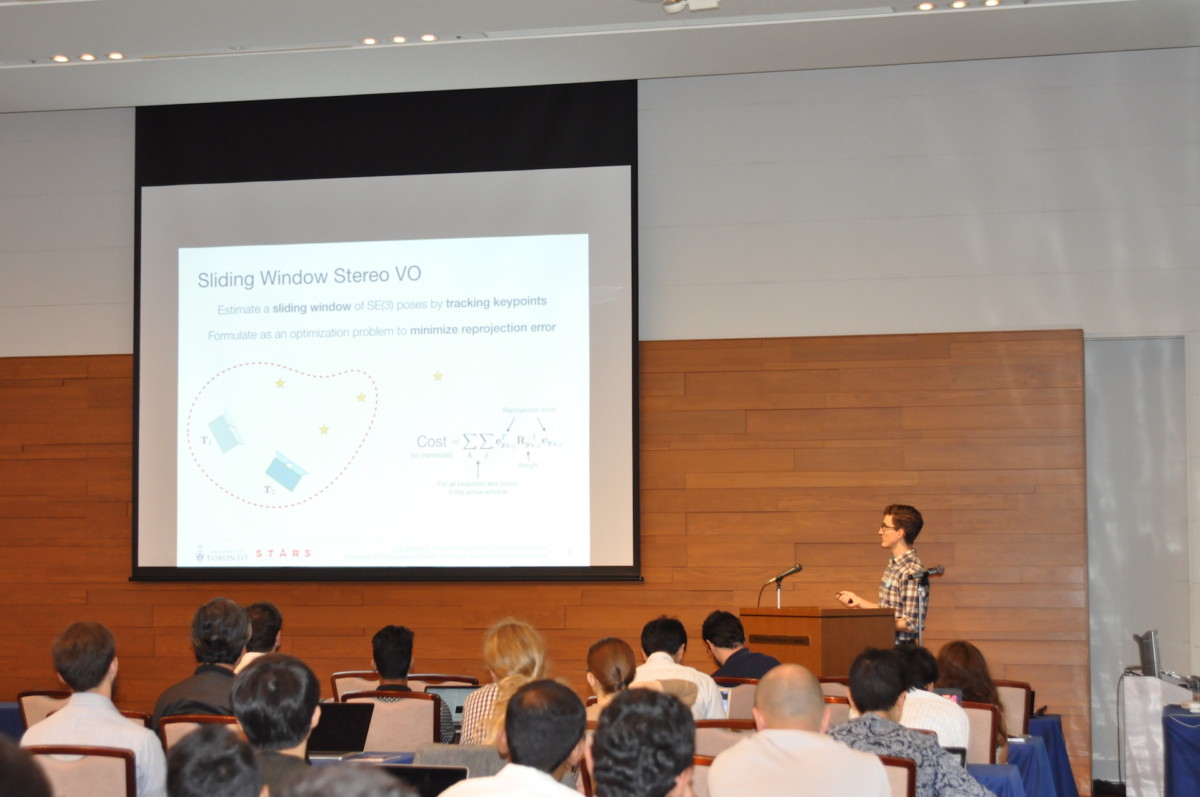
Lee presenting his paper with the help of some smooth animations.

Roboticists love silly photos.
STARS Research at SVAR 2016
We visited MDA in Brampton, Ontario today for the 2016 Space Vision and Advanced Robotics Workshop. Jacob presented his work on entropy-based extrinsic sensor calibration, while Valentin talked about first responder localization using foot-mounted IMUs. We took home Second Prize (space pens!) in MDA’s Best Demo competition!

“Infrastructure-free First Responder Localization” won Second Prize in the Best Demo competition!
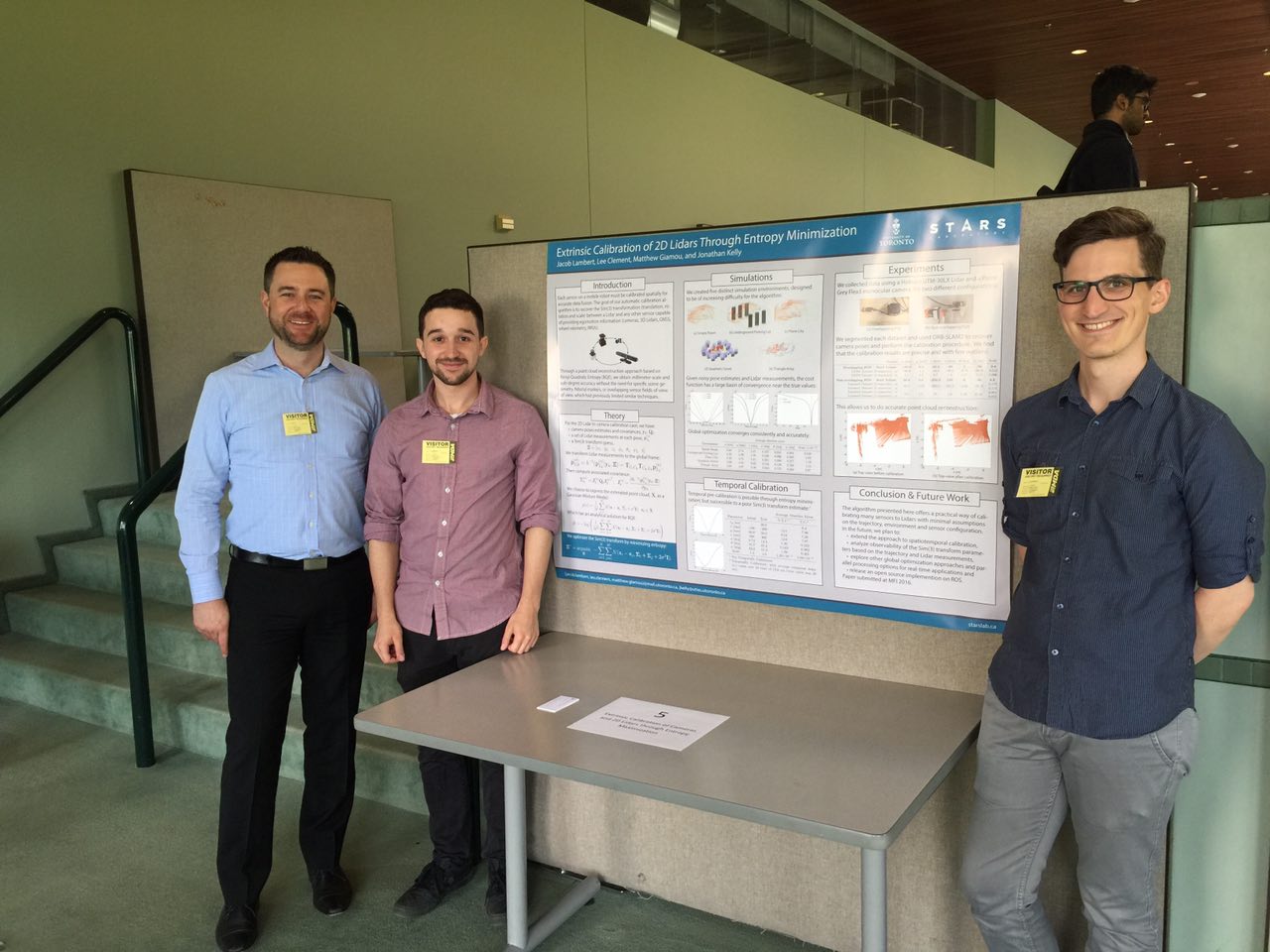
“Extrinsic Calibration of 2D Lidars Through Entropy Minimization”