Phone Thiha Kyaw
Ph.D. StudentDepartment: Current Students, PhD Students

Phone is exploring geometric methods to advance motion planning and task-level behaviours, making robots move and act more intelligently and efficiently.
Previously, he worked in robotics at Dyson and LionsBot International, where he contributed to many autonomy software stacks and large-scale robotic deployments. Phone also conducted research at the ROAR Lab, Singapore University of Technology and Design, and earlier studied Mechatronics Engineering at Yangon Technological University. He holds a first-class honours degree in Electronic Engineering from the University of Portsmouth.
You can find out more about him here.
Direct Informed Sampling on Riemannian Manifolds via Loewner Order Lower Bounds
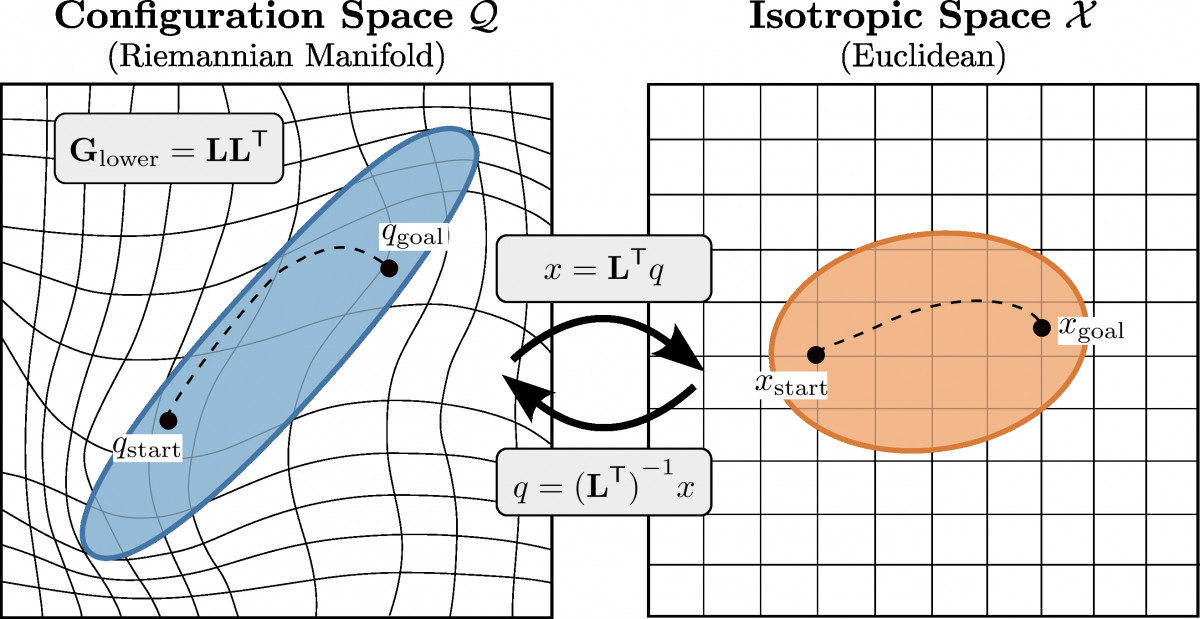
We bring informed sampling to motion planning on Riemannian manifolds through a matrix-valued admissible heuristic. By exploiting the Loewner order on symmetric positive definite matrices, our method preserves the full directional structure of the configuration-space metric, yielding tighter informed sets than Euclidean bounds. The resulting sets enable direct, rejection-free sampling, accelerating convergence across state-of-the-art asymptotically optimal planners.
arXiv, Robotics (2026)
Geometry-Aware Sampling-Based Motion Planning on Riemannian Manifolds
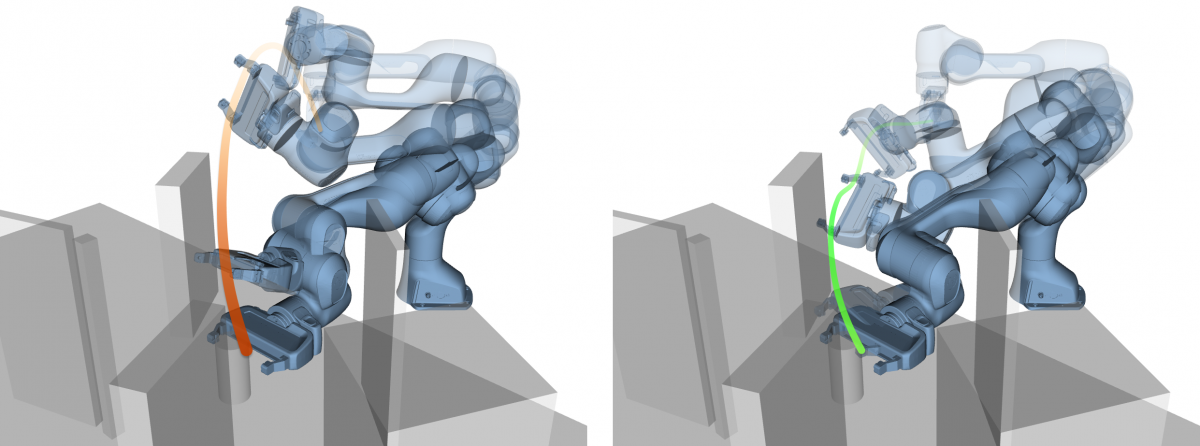
We introduce a framework for planning collision-free motions on non-Euclidean configuration manifolds. Our approach accounts for Riemannian structures often ignored by standard Euclidean methods and proposes a lightweight midpoint-based distance approximation and a local planner guided by first-order retractions and Riemannian natural gradients.
17th World Symposium on the Algorithmic Foundations of Robotics (WAFR), Oulu, Finland (2026)
Greedy Heuristics for Sampling-Based Motion Planning in High-Dimensional State Spaces
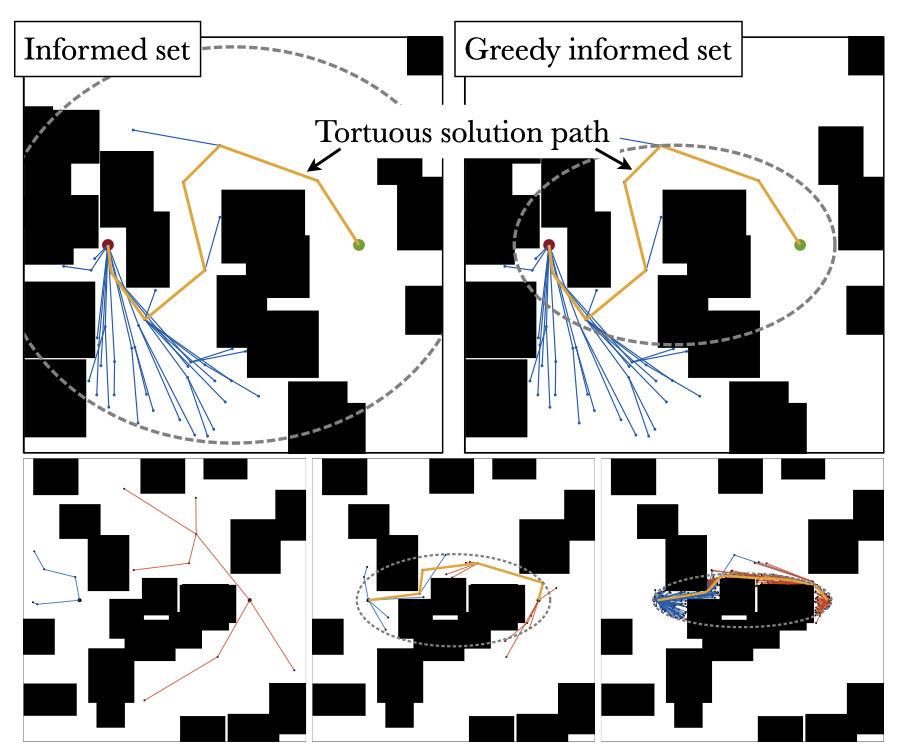
We develop a bidirectional, asymptotically optimal sampling-based planner that uses greedy heuristics to shrink the informed sampling region and focus search on the most promising regions of the problem domain.
arXiv, Robotics (2025)