Dr. Philippe Nadeau
Doctoral Candidate (2025)Department: Alumni
I envision a future where robots will have the ability to interact intelligently and safely with their environment through perception, prior knowledge, common sense, and reasoning. My current research lies at the intersection of perception and planning, with an emphasis on efficient algorithms that make use of models to be fast enough to be deployed on real robots in human-centric environments.
So far, I’ve had the chance to undertake research in many incredible laboratories such as the Control and Robotics (CoRo) Laboratory at ETS with Prof. Vincent Duchaine, the Embodied Dexterity Group (EDG) at UC Berkeley with Prof. Hannah Stuart, the Orthopedics and Imaging Laboratory (LIO) at ETS with Prof. Rachid Aissaoui and the STARS Laboratory at the University of Toronto with Prof. Jonathan Kelly.
I earned my Bachelor degree from the École de Technologie Supérieure (ETS) in the Department of Systems Engineering. At ETS, I was enrolled in Automated Manufacturing Engineering, which focuses on industrial robotics, mechatronics and control. I then joined the University of Toronto Institute for Aerospace Studies (UTIAS) where I completed my Ph.D. degree in robotics at the STARS Laboratory.
Stable Object Placement Planning

We introduce a planner designed to guide robot manipulators in stably placing objects within complex scenes much faster than other methods.
Philippe Nadeau and Jonathan Kelly
IEEE Transactions on Robotics, 2025.
Part Segmentation for Inertial Identification
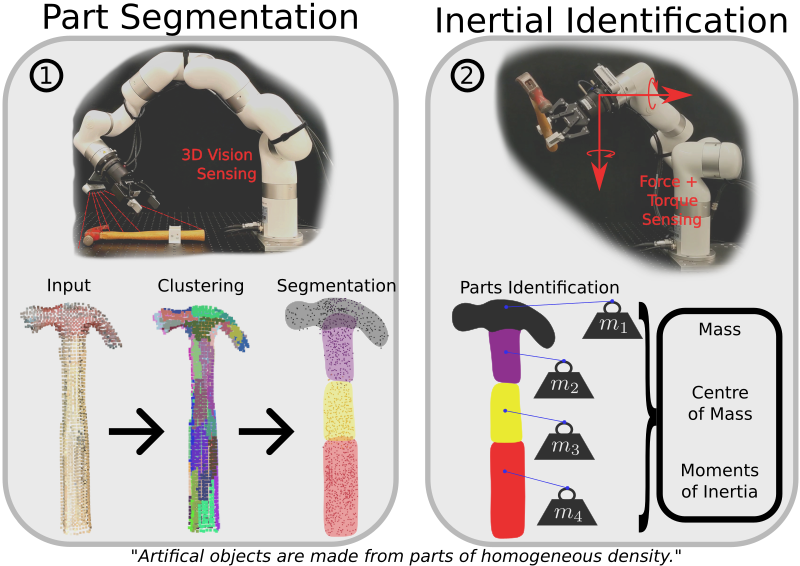
By combining visual and force-torque measurements, we develop an inertial parameter identification algorithm that requires slow or ‘stop-and-go’ motions only, and hence is ideally tailored for use around humans.
Philippe Nadeau, Matthew Giamou, Jonathan Kelly
International Conference on Robotics and Automation (2023)
Fast Inertial Identification with Cobots
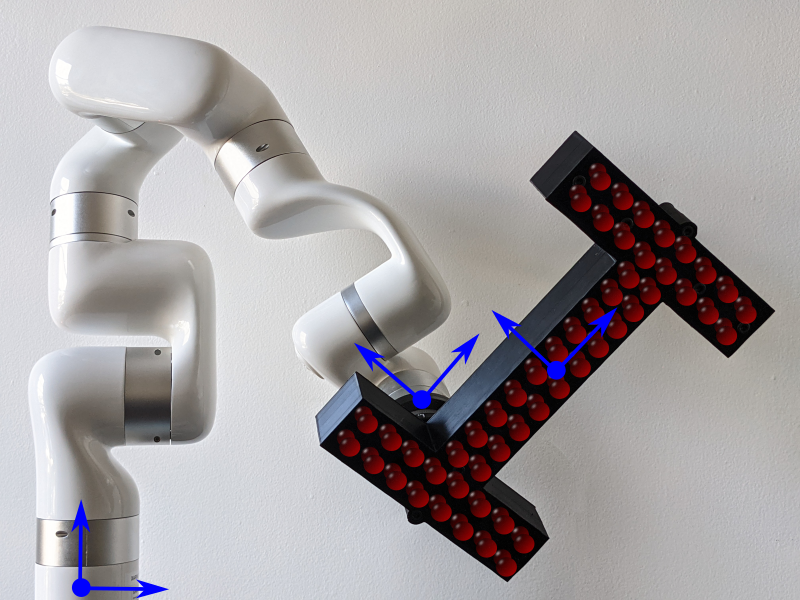
Providing cobots with the ability to quickly infer the inertial parameters of manipulated objects.
Philippe Nadeau, Matthew Giamou, Jonathan Kelly
International Conference on Robotics and Automation (2022)