Olivier Lamarre
Ph.D. StudentDepartment: Current Students, PhD Students

Long-range mobility in extra-terrestrial environments enables the characterization of planetary surfaces through in-situ observations and measurements across regional scales. Decades of crewed and robotic Lunar and Martian missions have undeniably expanded our knowledge of the solar system. Unfortunately, planetary robots have limited autonomy and require teams of human operators to provide instructions on a regular basis. A significant contributing factor, besides the lack of powerful onboard computational hardware, is the unknown nature of extra-terrestrial surfaces that can be hazardeous for planetary robots.
Olivier draws inspiration from past and ongoing rover missions to the Moon and Mars to increase the resiliency of long-range traverse strategies against environmental uncertainty. In that optic, his research focuses on the development of adaptive planning algorithms for kilometre-scale mobility. Technical problems of interest include optimizing risk-aware criteria for the safe traversal of environments with random terrain-dependent costs and spatiotemporal planning for solar-powered rovers affected by recurring stochastic faults.
Energy-Aware Planning for Planetary Navigation
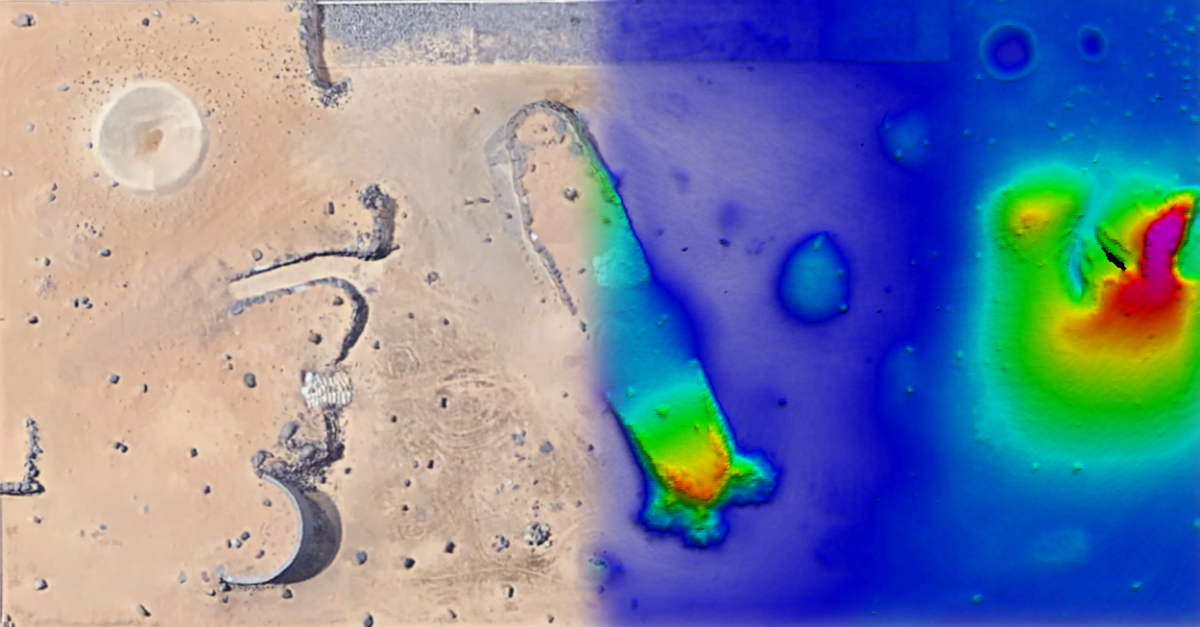
Orbital imagery and elevation model of the Canadian Space Agency’s Analogue Terrain.
Olivier Lamarre and Jonathan Kelly
International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS, 2018).
Olivier Lamarre, Oliver Limoyo, Filip Marić, and Jonathan Kelly
The International Journal of Robotics Research (IJRR).
Safe Spatiotemporal Planning for Solar-Powered Rovers at the Lunar South Pole
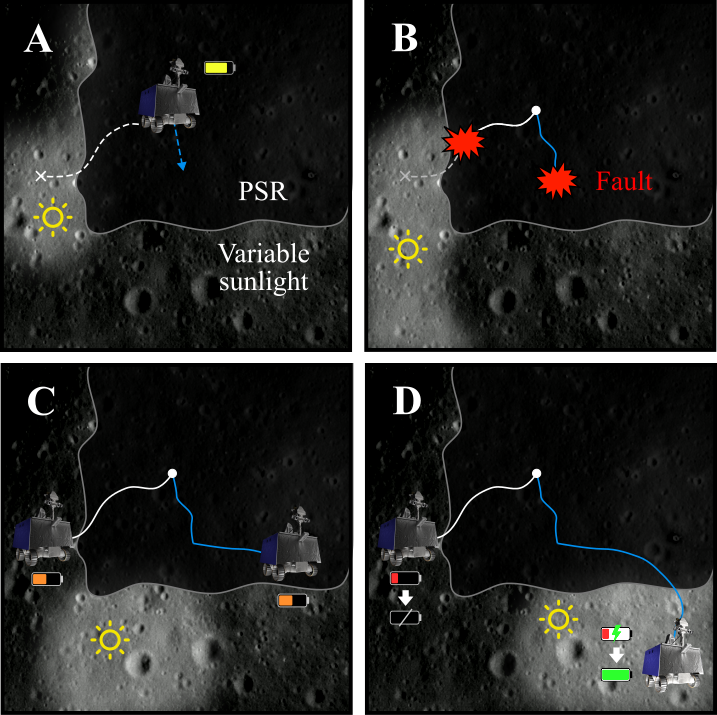
Risk-aware recovery policies for solar-powered rovers affected by recurring random faults.
Olivier Lamarre, Shantanu Malhotra and Jonathan Kelly
Acta Astronautica, vol. 213, pp. 706-724, 2023.
Olivier Lamarre, Shantanu Malhotra and Jonathan Kelly
IEEE Aerospace Conference (AERO, 2024)