Dr. Matthew Giamou
Doctoral Candidate (2022)Department: Alumni
What performance guarantees exist for algorithms running on complex robot systems that operate in dynamic environments shared with humans and other autonomous agents? This critical question motivates Matt’s past and ongoing work on safe robotic estimation and planning. Matt completed his Master’s degree in Aeronautical engineering at MIT, where he studied resource-efficient simultaneous localization and mapping (SLAM) with the Aerospace Controls Laboratory. His work focused on optimal communication and computation for multi-robot systems using SLAM in challenging mission scenarios like wilderness search and rescue.
During his PhD, Matt applied global polynomial optimization techniques to various estimation and planning problems involving 3D position and orientation. Matt is also interested in deriving bounds on measurement noise that ensure observability and fast, globally optimal solutions to key robotic estimation problems. These optimization methods, when combined with state-of-the-art learning-based solutions, will form a high-performance and provably safe architecture for mobile autonomous systems. Matt was a Vector Institute Post-Graduate Affiliate, the recipient of a 2019 Royal Bank of Canada Fellowship, and several other major awards. Matt worked on several projects including:
Global Polynomial Optimization for Robot Kinematics
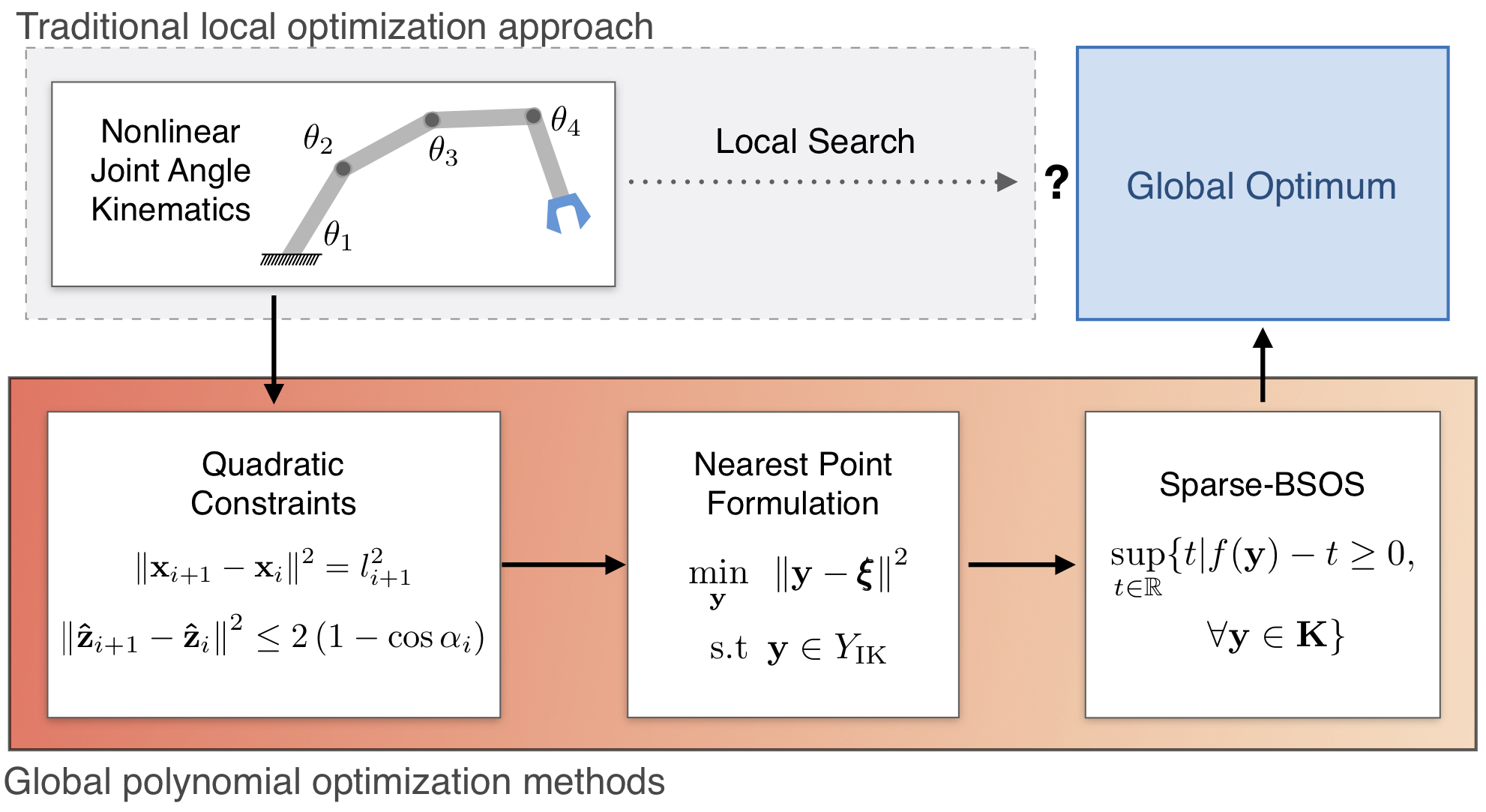
Convex relaxations for polynomial formulations of inverse kinematics.
Matthew Giamou*, Filip Marić*, David M. Rosen, Valentin Peretroukhin Nicholas Roy, Ivan Petrović, Jonathan Kelly, ICRA (2022)
Filip Marić*, Matthew Giamou*, Soroush Khoubyarian, Ivan Petrović, Jonathan Kelly, ICRA (2020)
Certifiably Globally Optimal Estimation via Convex Relaxations
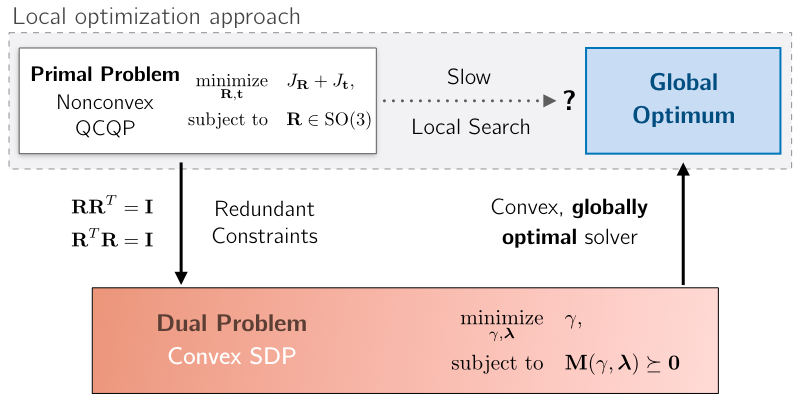
Dual SDP relaxation for extrinsic calibration.
Matthew Giamou, Filip Maric, Valentin Peretroukhin, Jonathan Kelly
arXiv pre-print.
Matthew Giamou, Ziye Ma, Valentin Peretroukhin, Jonathan Kelly, IEEE RA-L (2019)
Sensor Calibration for Robotic Systems
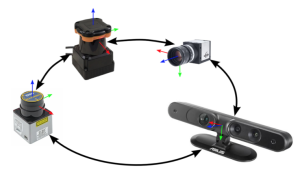
Self-calibration between sensors.
Emmett Wise*, Matthew Giamou*, Soroush Khoubyarian, Abhinav Grover, Jonathan Kelly, MFI (2020)
Jacob Lambert, Lee Clement, Matthew Giamou, Jonathan Kelly, MFI (2016)
Resource-Efficient Communication for Multi-Robot SLAM
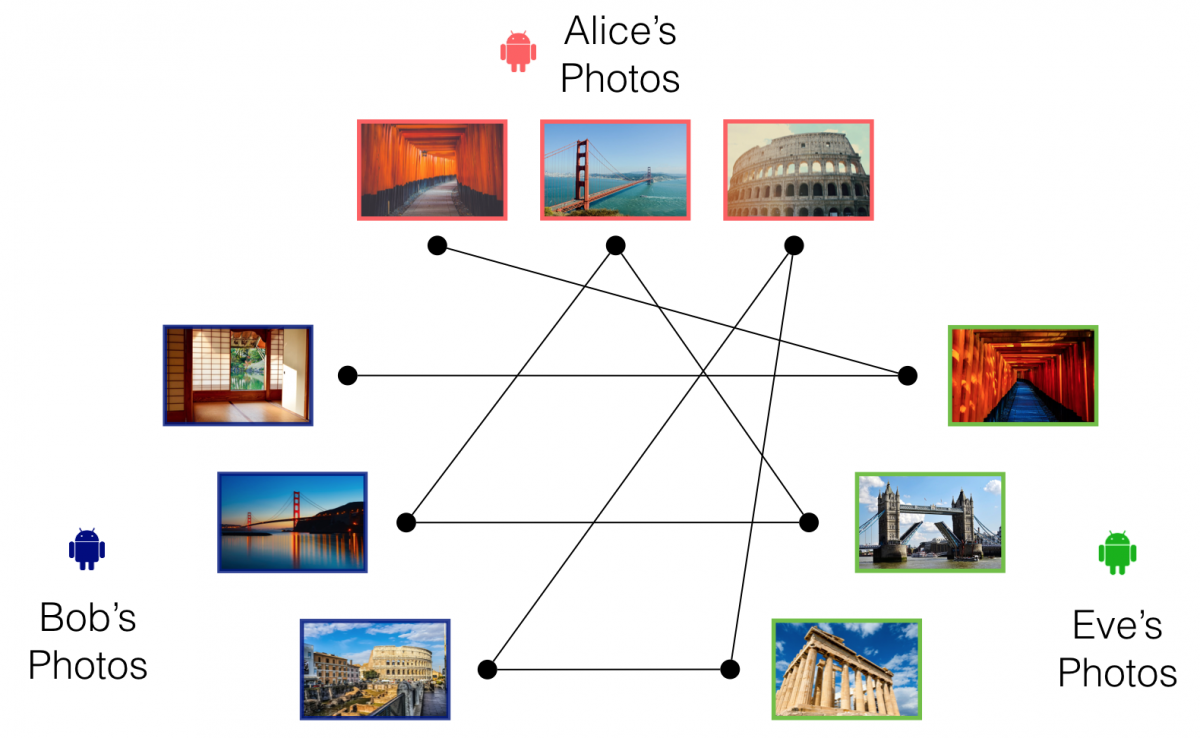
Measurement exchange graph for multi-robot SLAM.
Matthew Giamou*, Kasra Khosoussi*, Jonathan How, ICRA (2018)
Yulun Tian, Kasra Khosoussi, Matthew Giamou, Jonathan How, Jonathan Kelly, RSS (2018)
* Denotes equal contribution.