Congratulations to Valentin and Lee, whose paper, “Reducing Drift in Visual Odometry by Inferring Sun Direction using a Bayesian Convolutional Neural Network”, was accepted to ICRA 2017 in Singapore! Hope to see you there for the presentation!
Author Archives: Lee Clement
STARS at ISER 2016
Jonathan and Lee traveled to Japan this week for the 2016 International Symposium on Experimental Robotics (ISER) in Tokyo, where Lee presented his paper, “Improving Stereo Visual Odometry Using Visual Illumination Estimation”, to an enthusiastic crowd of robotics researchers from around the world. We had some great conversations over Japanese beer and fresh sushi, and took in the sights and sounds of Tokyo, narrowly avoiding a typhoon in the process. The next ISER is in Buenos Aires in 2018 — see you there!

Lee won one of six competitive travel grants to attend ISER, and has a cool certificate to prove it!
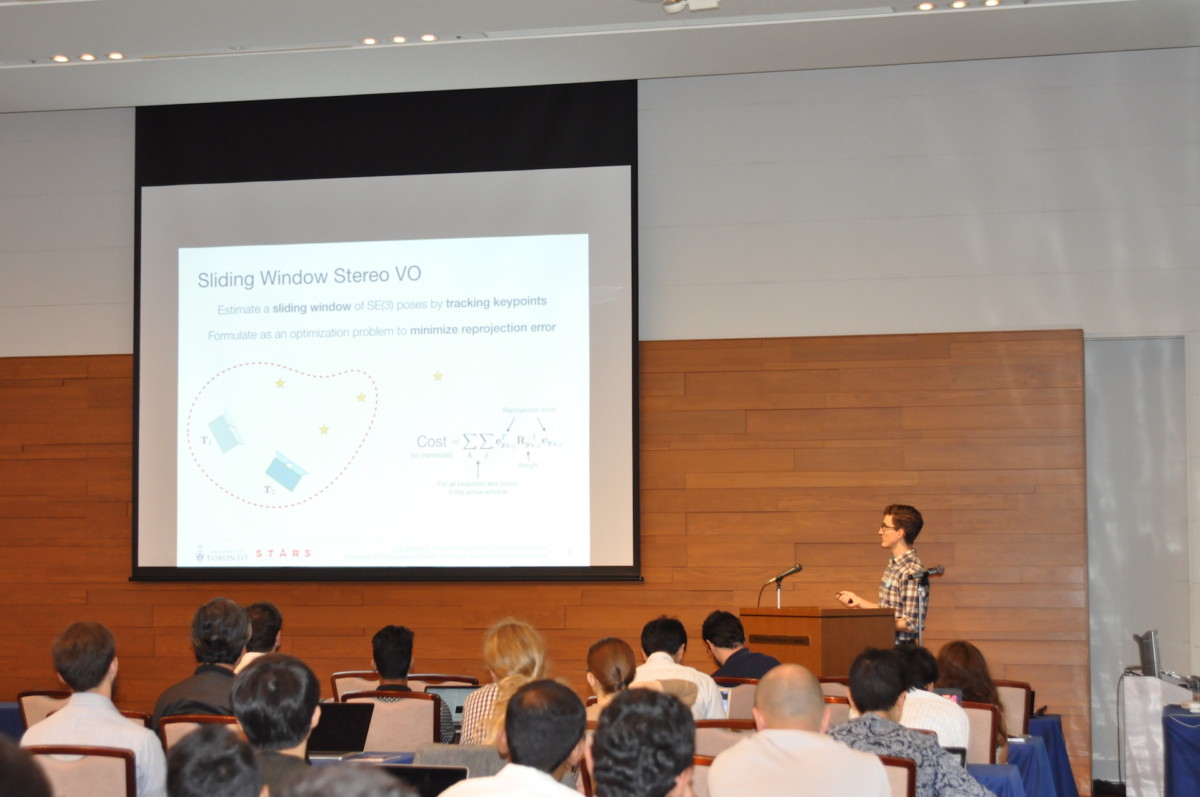
Lee presenting his paper with the help of some smooth animations.

Roboticists love silly photos.
STARS Research at SVAR 2016
We visited MDA in Brampton, Ontario today for the 2016 Space Vision and Advanced Robotics Workshop. Jacob presented his work on entropy-based extrinsic sensor calibration, while Valentin talked about first responder localization using foot-mounted IMUs. We took home Second Prize (space pens!) in MDA’s Best Demo competition!

“Infrastructure-free First Responder Localization” won Second Prize in the Best Demo competition!
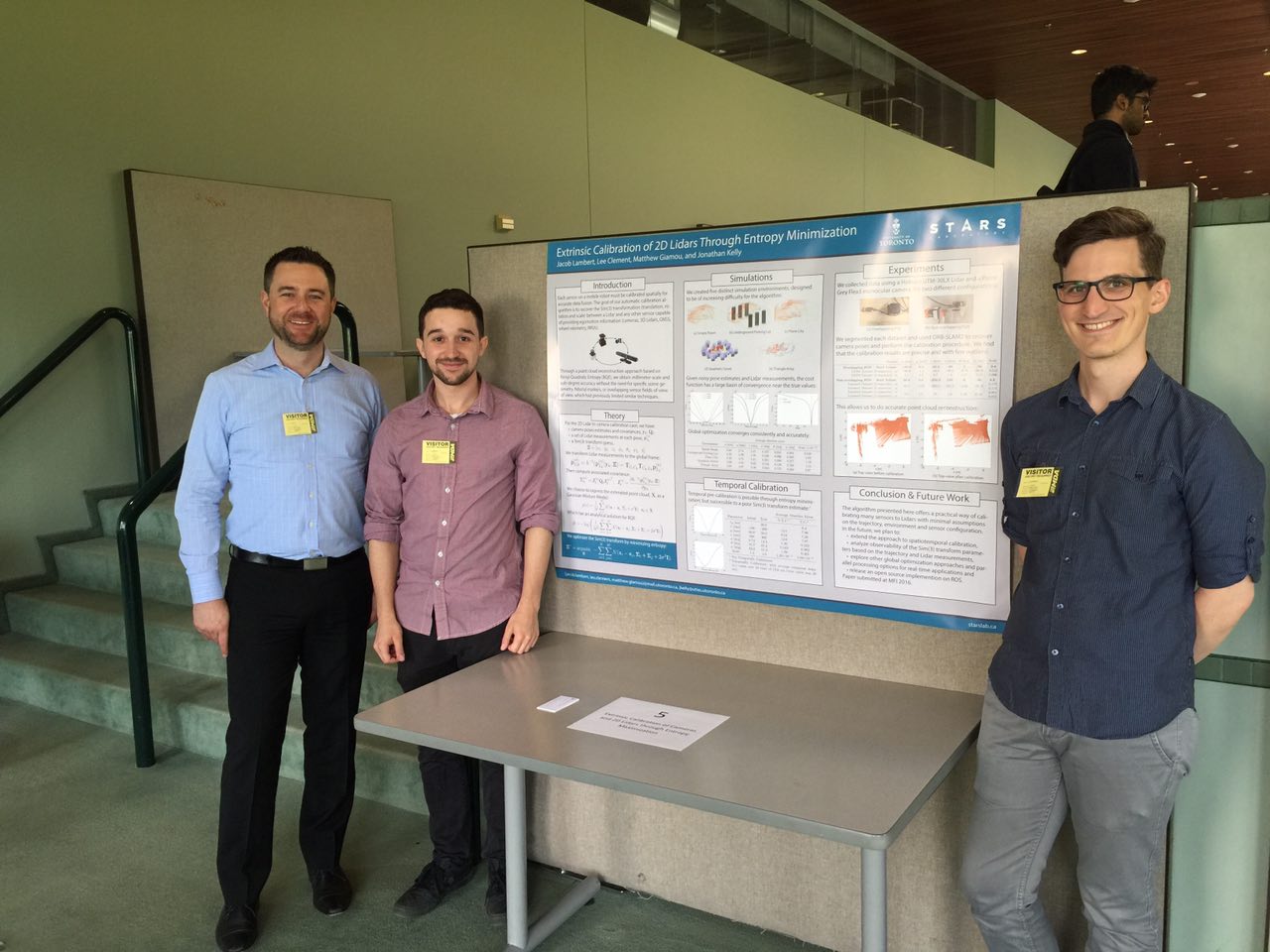
“Extrinsic Calibration of 2D Lidars Through Entropy Minimization”
ICRA 2016 paper accepted!
Congratulations to Valentin, who will be presenting “PROBE-GK: Predictive Robust Estimation using Gaussian Kernels” at ICRA 2016 in Stockholm, Sweden! See you there!