Valentin Peretroukhin will present his work on predictive noise modelling for visual-inertial navigation at IROS 2015 in Hamburg, Germany. This research enables learning of robust sensor noise models – making it easier to build consistent estimators. Congratulations Valentin!
Author Archives: Valentin Peretroukhin
CRV 2015 papers accepted!
We have two papers accepted at the 2015 Conference on Computer and Robot Vision in Halifax, Nova Scotia. Congratulations, Lee, Valentin, Jacob and Faizan!
FSR 2015 paper accepted!
Lee Clement’s work on a monocular Visual Teach and Repeat (VT&R) pipeline for mobile robots will be presented at the FSR 2015 conference in Toronto in June. The paper demonstrates that basic information about camera placement can be employed in a monocular VT&R system to enable kilometre-scale route repetition with performance nearly identical to that of stereo VT&R. Congratulations Lee!
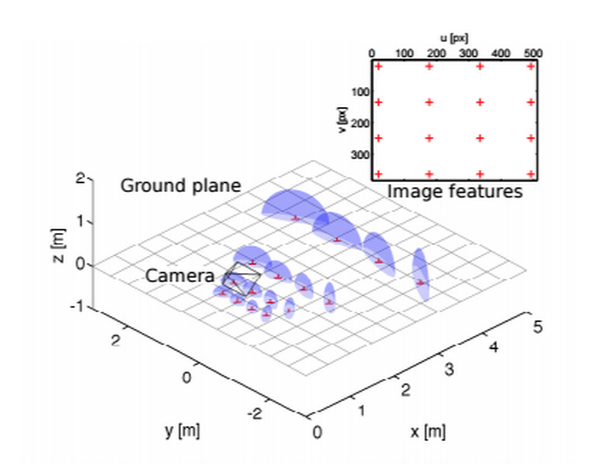
Example of noise model used in Lee’s paper to enable robust navigation.
Lee Clement awarded Molson Fellowship
Congratulations to STARS lab PhD student Lee Clement for being awarded the prestigious Molson Fellowship! This fellowship was established with a generous donation from the Kenneth M. Molson Foundation and matching funds from the University of Toronto and the Ontario Government.