Dr. Valentin Peretroukhin
Doctoral Candidate (2020)Department: Alumni
The deep learning revolution has lead to significant advances in the state-of-the-art in computer vision and natural language processing. For mobile robotics to benefit from the fruits of this research, roboticists must ensure these predictive algorithms are not only accurate in dynamic environments, inclement weather and under adverse lighting conditions, but that they also provide some consistent measure of uncertainty. In many cases, what is sufficient in a computer vision context is significantly deficient for use in mobile robotics, and vice-versa.
For example, an object classification algorithm with an accuracy of 95% may be sufficient to reach the state-of-the-art on some computer vision datasets, but may be completely unusable for safety-critical mobile autonomy applications. Conversely, an algorithm with an accuracy of 30% may be deemed unsatisfactory for many computer vision tasks, but may be more than enough for mobile vehicles, if it operates at high frequency, and produces consistent uncertainty estimates that can be used to eliminate poor classifications.
Valentin’s research focussed on bridging the gap between classical probabilistic state estimation and modern machine learning. He worked on several projects including:
HydraNet: A Network Structure for Learning Rotations with Uncertainty
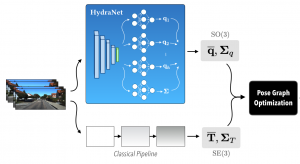
HydraNet aids classical egomotion pipelines by extracting latent representations of rotation with aleatoric and epistemic uncertainty.
Valentin Peretroukhin, Brandon Wagstaff, and Jonathan Kelly, CVPR (2019) Workshop on Uncertainty and Robustness in Deep Visual Learning
DPC-Net: Deep Pose Correction for Visual Localization
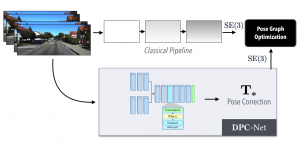
DPC-Net learns bias corrections to existing egomotion pipelines.
Valentin Peretroukhin and Jonathan Kelly, IEEE RA-L and ICRA (2018)
Sun-BCNN: Sun sensing through Bayesian CNNs
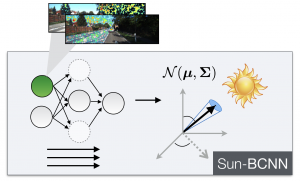
Sun-BCNN regressed the 3D direction of the sun to improve stereo VO.
Valentin Peretroukhin, Lee Clement, and Jonathan Kelly, IJRR (2018)
Reducing Drift in Visual Odometry by Inferring Sun Direction using a Bayesian Convolutional Neural Network
Valentin Peretroukhin, Lee Clement, and Jonathan Kelly, ICRA (2017)
Predictive Robust Estimation
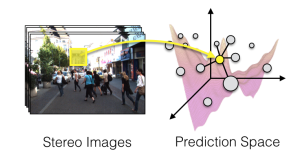
PROBE maps visual landmarks into a prediction space.
Valentin Peretroukhin, William Vega-Brown, Nicholas Roy, and Jonathan Kelly, ICRA (2016)
PROBE: Predictive Robust Estimation for visual-inertial navigation
Valentin Peretroukhin, Lee Clement, Matthew Giamou, and Jonathan Kelly, IROS (2015)