Lee Clement’s work on a monocular Visual Teach and Repeat (VT&R) pipeline for mobile robots will be presented at the FSR 2015 conference in Toronto in June. The paper demonstrates that basic information about camera placement can be employed in a monocular VT&R system to enable kilometre-scale route repetition with performance nearly identical to that of stereo VT&R. Congratulations Lee!
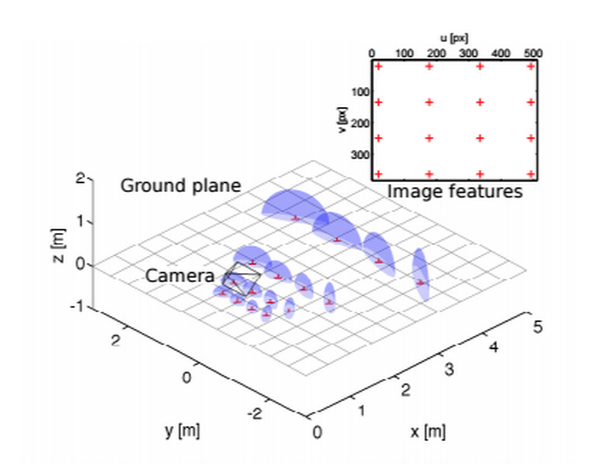
Example of noise model used in Lee’s paper to enable robust navigation.